服务支持 Services
可测深度摄像头(TOF Camera)原理是什么?
可测深度摄像头(TOF Camera)原理是什么?
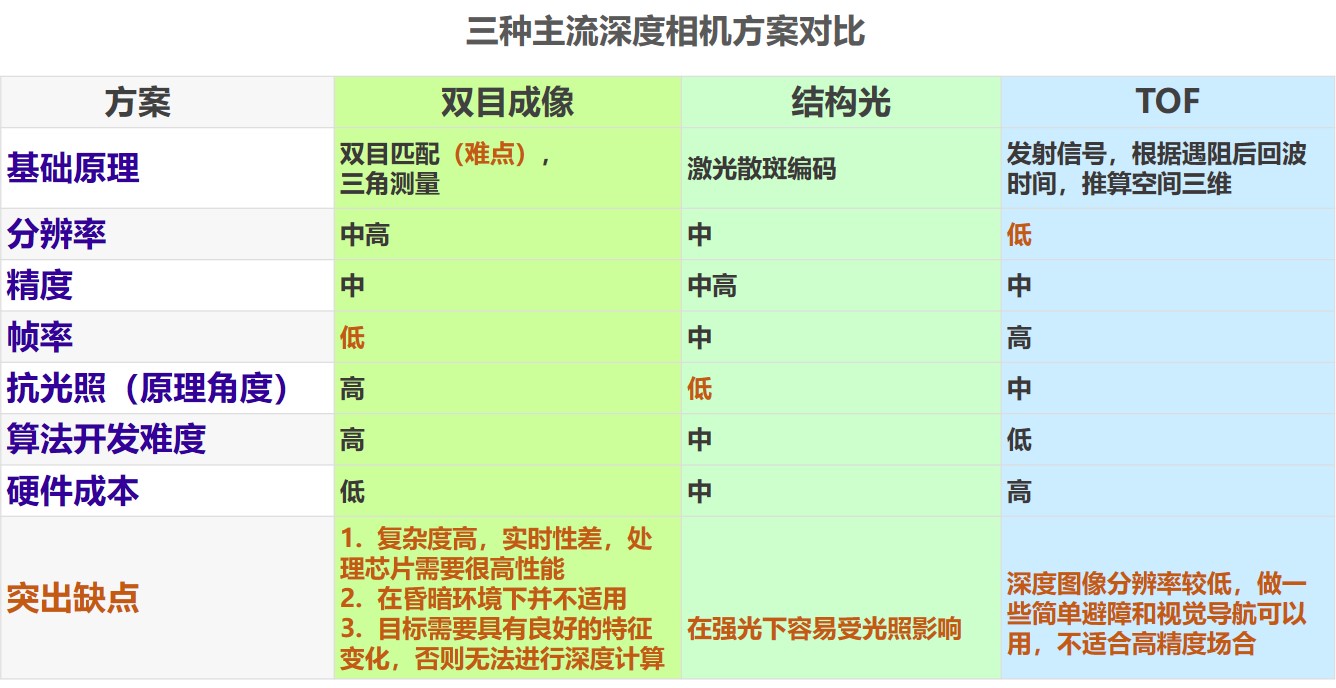
首先,TOF 只是 3D 深度摄像技术中的一种方案。目前主流的 3D 深度摄像主流有三种方案:结构光、TOF、双目成像。
1、结构光(Structured Light):结构光投射特定的光信息到物体表面后,由摄像头采集。根据物体造成的光信号的变化来计算物体的位置和深度等信息,进而复原整个三维空间,(苹果iPhone X 用的就是这个方案);
2、TOF(Time Of Flight):TOF 系统是一种光雷达系统,可从发射极向对象发射光脉冲,接收器则可通过计算光脉冲从发射器到对象,再以像素格式返回到接收器的运行时间来确定被测量对象的距离;
3、双目成像(Stereo System):利用双摄像头拍摄物体,再通过三角形原理计算物体距离。这三种方案中,双目测距成像因为效率低、算法难、精度差、容易受到环境因素干扰。
TOF 方案同样有精度缺陷,传感器体积小型化之后对分辨率影响大。